


First of all, you must know which application will be performed by the robot. This criteria will initially guide you when choosing which kind of robot you need to buy. If you are looking for a compact pick and place robot, you may want to choose a Scara robot. If you are looking more at placing small objects at a fast rate, a Delta robot will suit you best. If your application needs to be done alongside human workers, a collaborative robot should be your robot of choice.
For the following discussion, we will focus specifically on industrial robots. This kind of robot can suit a very large array of applications – from material handling to machine tending, as well as welding and material removal. These days, industrial robot manufacturers basically have a robot for every application. You just need to identify what you want to do with your robot and choose between all of the different models.
The payload is the maximum load that the robot can carry in its working space. If you are looking to carry a part from one machine to another, you need to incorporate the part weight and the robot gripper weight into the payload. For further information on payload, you should take a look at the following article that explains the difference between payload and grip force.
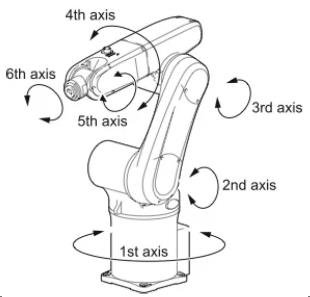
The quantity of axes on a robot is directly related with the its degree of freedom. If you are looking for a really straightforward application, such as pick and place from one conveyor to another, a simple 4 axis robot is enough. However, if your application needs to be executed in a small work space and the robot arm needs to twist and turn a lot, a 6 or 7 axis robot would be the best option. The number of axes is generally dependent on the application. You should take note that having too many axes is not a problem in terms of flexibility. In fact, if you will be moving the robot to another application in a couple of months, you may want to have more axes rather than not enough. The downside of having too many axes though, is that if you only need 4 axes, you will still need to program 2 supplementary axes for nothing.
Robot manufacturers tend to use slightly different nomenclature for the axis or joint names. Basically, the first joint (J1) is the one that is closest to the robot base. The following joints are called J2, J3, J4 and so forth, until we reach the wrist. Other companies such as Yaskawa/Motoman use a lettered nomenclature for their axes.
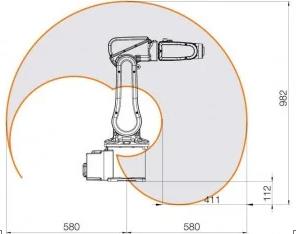
When looking at your target application, you should know what maximum distance the robot needs to reach. Selecting a robot is not all about the payload – it also needs to reach a certain distance. Every company gives the work envelope of the robot, therefore you can determine if the robot is suitable for a specific application. The maximum vertical reach for a robot is measured from the lowest point that the robot can reach (often under the robot base) to the maximum height that the wrist can go. The maximum horizontal reach is the distance from the center of the robot base to the farthest point the wrist can reach horizontally. You should also take a look at the different motion range (expressed in degrees). These specifications are quite different from one robot to another and can be very limiting for certain applications.
Once again, this factor depends on your application. The repeatability can be described as the capacity of the robot to reach the exact same position each and every time it completes a routine. Most of the time, the robot can repeat inside 0.5mm and sometimes even more. For example, if your robot is needed to build an electronic circuit board, you may want to have a super repeatable robot. If your application is quite rough, the industrial robot doesn’t need to be that precise. This measure is expressed in plus or minus ‘’±’’ because of the 2D aspect. In fact, since the robot is not linear, the tool can be anywhere in the tolerance radius.
This criteria is relative to every user. In fact, it depends on the rate in which the job needs to be done. The spec sheets always express maximum speed, but you should know that all of the speeds can be reached between 0 and maximum speed. This motion unit is often in degrees/second. Some robot manufacturers incorporate the maximum acceleration rate.

Robot mass is an important factor when designing a robot cell. If the industrial robot needs to be sitting on a custom bench or even on a rail, you may want to know its weight to design the corresponding support.
Basically every robot manufacturer provides information on the braking system on their robot. Some of robots have brakes on all axes and others don’t. To have a precise and repeatable position in the workspace, you need to have a sufficient number of brakes. The inertia of certain robot segments can be provided by the manufacturer. In fact, for designing security features this would be a plus. You may also notice the different applicable torques on the axis. For example, if your manoeuvre requires a certain amount of torque to complete the job properly, you need to check if the maximum torque applicable on the axis is correct. If it is not correct, the robot may shut down due to an overload.
Depending on where you want your robot to work you may need to achieve a certain Ingress Protection rating or IP rating. In fact, if the robot works with nutrition related products, laboratory tools, medical tools or in highly flammable environments, the IP ratings will be different. This criteria is an international norm and you obviously need to verify if your application needs a certain protection or if you can use a local rating. Some manufacturers provide the same robot with different IP ratings depending on where the robot needs to work.
I hope this article gives you a few tips to consider for your next industrial robotic investment. We have put together different comparison sheets for industrial robots with payloads from 5 to 10 kg and for industrial robots with payloads from 20 to 50 kg. These grids only include the industrial robots that are specific to material handling, which means that there are no Scara, Delta or welding robots mentioned. I am sure you will find comparing the different robots interesting!


In the world of smart manufacturing and industrial robotics, a robotic arm…

In today’s era of Industry 4.0 and smart manufacturing, flexibility …

In the modern manufacturing landscape, industrial automation is no longer…

In the era of smart manufacturing and industrial automation, the demand fo…

In the rapidly evolving landscape of smart manufacturing, efficiency is t…
+86 19137105901
Chat online




 Language
Language